
›
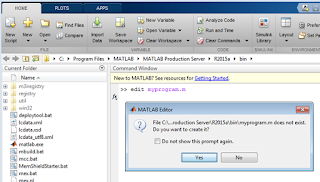
 This lecture we will practice some Basic MATLAB Scripts.
This lecture we will practice some Basic MATLAB Scripts.
›We will start with simple scripts and will discuss some electrical engineering applications.
Program to calculate Electricity bill.
w = input('Enter power of your device (in watts): ');
h = input('Enter time (in hours): ');
r = input('Enter electricity rate (in dollars per KWH): ');
ec = w * h/1000 * r;
disp(’Your Electricity bill is’)
Disp(ec)
Power transfer vs Load resistance curve
RL = 1:0.01:10;
Vs = 12;
Rs = 2.5;
P = (Vs^2*RL)./(RL+Rs).^2;
plot(RL,P)
xlabel('Load resistance')
ylabel('Power dissipated')
Torque-Speed Curve for a squirrel cage Induction Motor

›Ns=1500; % Synchronous speed;
›R1=15.6 ;R2=14;X1=18; X2=23;Xm=260;Vt=400/sqrt(3);
›s = 0.002:0.002:1; % vector of slip
›N = Ns.*(1-s); % Speed, in RPM
›Ws = 2*pi*Ns/60; % Synchronous speed in rad/sec
›Rr = R2./ s; % Rotor resistance
›Zr = j*X2 + Rr; % Total rotor impedance
›Za = j*Xm*Zr./(j*Xm+Zr); % Air-gap impedance
›Zt = R1 + j*X1 +Za; % Terminal impedance
›Ia = Vt ./ Zt; % Terminal Current
›I2 = j*Xm*Ia./(j*Xm+Zr); % Rotor Current
›Pag = 3* (abs(I2)).^2.*Rr; % Air-Gap Power
›Pm = Pag.* (1-s); % Converted Power
›Trq = Pag/ Ws; % Developed Torque
›subplot(2,1,1)
›plot(N, Trq)
›xlabel('Speed in RPM')
›ylabel('Torque (Nm)')
›subplot(2,1,2)
›plot(Ia, Trq)
›xlabel('Load Current')
›ylabel('Torque (Nm)')
 This lecture we will practice some Basic MATLAB Scripts.
This lecture we will practice some Basic MATLAB Scripts.›We will start with simple scripts and will discuss some electrical engineering applications.
w = input('Enter power of your device (in watts): ');
h = input('Enter time (in hours): ');
r = input('Enter electricity rate (in dollars per KWH): ');
ec = w * h/1000 * r;
disp(’Your Electricity bill is’)
Disp(ec)
Power transfer vs Load resistance curve
RL = 1:0.01:10;
Vs = 12;
Rs = 2.5;
P = (Vs^2*RL)./(RL+Rs).^2;
plot(RL,P)
xlabel('Load resistance')
ylabel('Power dissipated')
Torque-Speed Curve for a squirrel cage Induction Motor

›Ns=1500; % Synchronous speed;
›R1=15.6 ;R2=14;X1=18; X2=23;Xm=260;Vt=400/sqrt(3);
›s = 0.002:0.002:1; % vector of slip
›N = Ns.*(1-s); % Speed, in RPM
›Ws = 2*pi*Ns/60; % Synchronous speed in rad/sec
›Rr = R2./ s; % Rotor resistance
›Zr = j*X2 + Rr; % Total rotor impedance
›Za = j*Xm*Zr./(j*Xm+Zr); % Air-gap impedance
›Zt = R1 + j*X1 +Za; % Terminal impedance
›Ia = Vt ./ Zt; % Terminal Current
›I2 = j*Xm*Ia./(j*Xm+Zr); % Rotor Current
›Pag = 3* (abs(I2)).^2.*Rr; % Air-Gap Power
›Pm = Pag.* (1-s); % Converted Power
›Trq = Pag/ Ws; % Developed Torque
›subplot(2,1,1)
›plot(N, Trq)
›xlabel('Speed in RPM')
›ylabel('Torque (Nm)')
›subplot(2,1,2)
›plot(Ia, Trq)
›xlabel('Load Current')
›ylabel('Torque (Nm)')







